Dela
编者按:《郭继舜带你读汽车科技》旨在从第一性原理出发,尝试拨开迷雾,解读热点背后的汽车科技真相。
本栏目由智能驾驶专家郭继舜博士与汽车之心联合出品,内容独家授权汽车之心发布。
今天我们聊聊基于 5G-V2X 的路端建设。
我们讲过一期 5G 车路协同的解读(《为什么实现车路协同比造一辆特斯拉还难?》),后来读者群里(P.S.添加微信号 autobit101 加入读者群)有小伙伴留言想要了解基于 5G 通信的车联网场景技术落地的相关内容。
今天的音频向大家分享下我个人在这方面的理解。
因为 5G 和车路协同现阶段都是热门技术,发展很快,相关技术标准还没有成熟,我们现阶段也暂时是基于 5G 民用通讯网络的实验网进行相关的车载测试,如果有部分信息不够专业和准确,还请大家多多指正。
基于 5G 的车联网场景主要可概括为两大类:网联和智驾。
网联场景可以概述为以人为中心的车载互联系统,即依托 5G 网络,车辆将集成智能家居、语音识别、人脸识别、互联娱乐、网上购物等功能,使车辆成为家和办公室以外的第三空间。
网联场景的实现主要依赖于 T-BOX,在未来一到两年的时间里,可逐步用 5G T-BOX 替代现有的 4G T-BOX 来实现应用落地。
今年下半年 5G T-BOX 产品将陆续量产,今明两年,国内外主要 OEM 都计划推出 5G 的网联车辆,相信很快 5G T-BOX 将成为新车标配。
随着 5G 相关技术的提升,AR/VR、4K 视频等技术的逐步引入,网联场景也将逐步得到更加丰富的展现。
5G 车联网在网联场景的应用属于性能的提升,并不是大的功能的变化,落地应用路线明确,也相对简单。然后,咱们重点聊聊 5G 车联网在智驾场景的落地应用。
智驾场景可以概述为以车为中心的智能驾驶系统,即依托 5G 车联网,将单车智能升级为车路协同的多车智能。
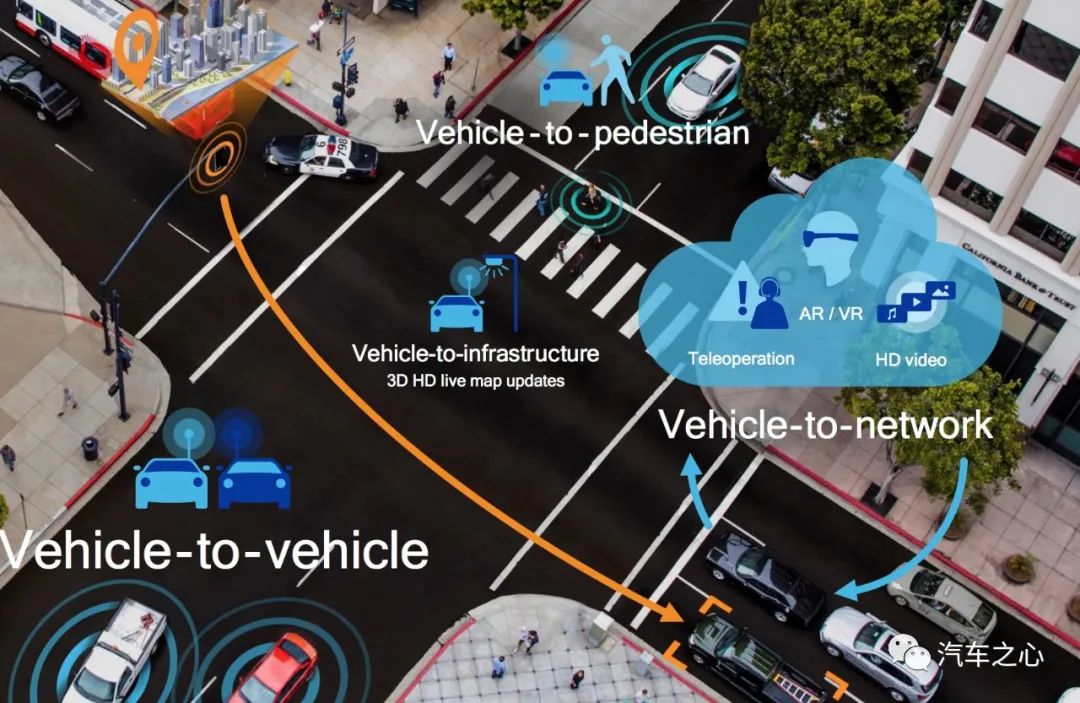
我们在之前的音频中已经简单介绍过,车联网主要包括 V2V、V2I、V2N 以及 V2P 等四类。
V2V 方案的实现主要依赖于车载通讯设备,如 OBU、V-BOX 等产品。
由于 5G NR V2X 的相关标准 R16 尚未发布,适用于 5G 的 OBU/V-BOX 等车规级产品还没有量产。
R16 标准按计划今年发布,标准发布半年后,相关芯片、模组及终端产品将会陆续量产,预计明年下半年将开始车端的量产搭载。
V2P 方案的实现依赖于人们携带的移动穿戴设备,但也可通过 V2I 的方案间接实现。
我听到的一个好消息是,华为计划在下一代的手机用麒麟芯片中加入 V2P 模块,如果我们使用华为手机,就可以选择将自己的地理位置信息去隐私化后上传到云端,实时提醒我们周边的车辆注意行人。
这将很好地避免夜间或者处在视觉盲区的车辆对我们造成人身伤害。
V2I 和 V2N 方案是实现车路协同的核心,也是车联网基础设施的主体。
其中「I」为 Infrastructure,指路侧基础设施,包括通讯设备、感知设备、计算设备等;
「N」为 Network,指车联网云平台,包括边缘云、核心云等。车路协同主要涉及三个端口:车端、路端和云端,车端主要依赖 OBU/V-BOX。
下面我将重点分析路端和云端的建设。
路端设备主要包括:
1)路侧通讯设备,也就是 RSU,主要实现 V2I 通讯,将结构化的路侧数据通过无线通讯方式广播出来;
2)感知设备,包括摄像头、毫米波雷达、激光雷达等,主要用于道路环境的检测,包括道路信息、车辆、行人等,多传感器的融合可以弥补各自的感知缺陷;
3)路侧计算单元,如华为的边缘小站等产品,主要用于感知数据处理、融合等,将原始数据处理为标准的结构化数据;
4)辅助设备,如交换机、供电设施等。
云端的设备主要包括服务器、显示器及其辅助设备等,除了这些硬件,云端更重要的是软件,包括基础软件和应用层软件。
基础软件主要指云平台的底层操作系统、环境配置等,比较容易实现。
应用层软件包括数据管理系统,如数据接入、协议解析、数据分析、数据存储等;高精度地图等基础数据;设备及车辆监控系统;测试分析与仿真系统;车联网应用服务软件;大数据应用及算法训练;信息安全服务系统还有设备管理系统等。
因为 C-V2X 的车路协同技术是一个比较新兴的技术,而且欧美之前的 DSRC 车端通讯网络协议相较于我们国家现在倡导推行的 C-V2X 技术先进性差距较大,参考性并不强,所以针对车路协同云端的应用层软件需求缺口很大。
因为承担了广州智能网联先导示范区的建设和频段运营的工作,我们沟通了挺多的 SaaS(软件即服务)的合作伙伴,暂时还拿不出系统级的完善的解决方案。
所以,在新基础设施建设快速发展的大背景下,车路协同的云端应用层软件,以及系统整体的软件、数据整合,都是大有可为的技术领域。
除此之外,路端和云端等建设还需要 4G/5G 基站及光纤网络作为通讯纽带,以及智慧灯杆等作为安装载体,同时也涉及交通设施、电网设施的改造。
以 5G 车联网示范区建设为例,我介绍下 5G 车联网的应用落地,可主要概括为以下几个建设步骤:
第一步: 道路选择及道路类型分析。
综合示范区的路网规划、道路综合安全指数、交通流量、人口密度、服务设施(医院、学校等)等,选择车路协同建设的道路,该环节可联合相关政府部门,如省/市交通勘察设计院来完成;
然后对所选道路进行道路类型分析和统计,道路类型可初步划分为信号灯十字路口、信号灯 T 型路口、无信号的十字路口、无信号的 T 型路口、环岛、掉头、桥梁、直路等,并对数量和长度进行统计。
第二步:确定道路建设等级。
欧洲根据基础设施对自动驾驶的支持,将基础设施划分为 A~E 5 个等级。
国内业内也尝试将车联网划分为网联辅助信息交互、网联协同感知、网联协同决策与控制三个等级,与欧洲形式有所不同,但内涵一致。
以不同阶段的网联化建设为目标,根据道路覆盖度和路侧设备配置,将道路车联网建设等级划分为:顶配、高配、中配、低配。
如低配可以只考虑有信号灯的路口,路侧设备主要是 RSU 和摄像头等;顶配、高配则实现全路段道路覆盖,路侧设备也将面向 5G RSU 以及摄像头、毫米波雷达、激光雷达等多传感器配置。
第三步:方案设计。
根据道路类型和建设等级,设计车联网建设方案。
路口、环岛等特殊道路优先部署,普通直路可 200 米/套进行部署。
十字交叉路口可以部署 1 个 RSU、4 个枪机摄像头、4 个球机摄像头、4 个毫米波雷达、2 个激光雷达、1 个路侧计算单元等。
这样可以基本实现交叉路口的无盲区多感知融合探测,其它路口可根据十字路口方案进行删减。
直路包括 2 个枪机摄像头、1 个球机摄像头、2 个窄角毫米波雷达、1 个广角毫米波雷达、1 个路侧计算单元,其中,2 个枪机摄像头和 2 个窄角毫米波雷达一前一后部署,分别检测来向和去向车辆,相邻站点可共用一个 RSU,400 米/个。
设备数量可根据道路宽度增加。
感知设备通过网线与路侧计算单元相连,如果是多路设备,就需在中间增加交换机;RSU 也通过网线与路侧计算单元相连。
感知设备进行实时数据采集,传感器数据经网线传递给路侧计算单元进行数据处理、融合,并将融合后的结构化数据输出到 RSU 对外广播。
其中,多个感知设备可以共用一个路侧计算单元,相邻感知设备、路侧计算单元可共用一个 RSU。
云平台的建设可采用边缘云+核心云的方案,例如广州市车联网的建设,可以部署一个核心云和若干边缘云。
边缘云可大可小,按区域部署,实现局部数据的快速处理和分发。
一般来说,每 15-25 个路口共用一个边缘云平台。云端和路端设备之间通过光纤相连。
第四步:路侧设备选型。
RSU 应注重通讯距离、互联互通、可靠性等关键指标;感知设备应注重有效探测距离、精度、FOV、可靠性等关键技术指标;路侧计算单元应考虑软件可升级性能,支持 OTA。
路侧设备应根据场景应用需求进行选型,在满足性能要求的前提下再考虑已有设备的复用。否则会出现有些示范区设备利用率低,运维费用高等问题。
这一点,我举个例子,我看到有些建设方案,倡导充分利用现有的交通摄像头,但我在设计具体的技术方案中发现,由于现阶段已有的交通摄像头部署年限差距比较大、种类多、精度不一,需要设计复杂的图像处理算法来达到多摄像头数据拼接共用,技术实现上很麻烦,我个人觉得有点儿得不偿失。
第五步:施工方案协同设计及协同建设。
由政府部门协助,结合路网规划、现有交通/网络设施,与基站、智慧灯杆等协同设计,制定施工方案。
车联网系统是集路侧设施、云平台、4G/5G 网络、智慧灯杆、交通设施等一体的系统,所以要协同设计、协同建设。
以上,我相对系统地介绍了车路协同中路端设备的建设方法步骤,希望提出这个话题的读者群中的小伙伴满意。
因为时间和篇幅的限制,不能讲得太详细,欢迎微信或者电话和我联系,我们多多交流。
前几期的音频中,我们也提到车联网的基础设施建设需要投入大量的人力、物力和社会资源,是一个长期的建设过程,是个从点到面的扩展过程,也是一个从 4G 到 5G 的升级过程。
在这场由政府主导的交通大变革中,我坚定地认为:路端设施的改造增强,能够解决智能驾驶单车智能中很多天然的技术缺陷,智能驾驶技术将在 5G C-V2X 的加持下,最终实现人类出行零伤亡的终极目标。
往期回顾:
Mobileye炫技,仅凭12摄像头穿越闹市区,一辆优秀的L4无人车该是怎样的
本期制作
主讲:郭继舜 监制:王德芙
编辑:叶方 后期:陆非
设计:陈溪阳 运营:林芝芝
音频平台
喜马拉雅 | 蜻蜓 FM | 听伴
Podcasts | 小鹅通
在以上平台搜索关注汽车之心
即可收听全部节目
Avsnitt sparat!
Du hittar sparade avsnitt på Mina sidor.
Kunde inte spara avsnitt
Något gick fel. Försök igen.